In questi ultimi mesi, si sente parlare sempre più spesso di “droni”, sia in televisione che sui quotidiani. Fino a qualche tempo fa si identificavano con questo nome soltanto i droni militari, quelli che abbiamo visto in azione in diverse operazioni di guerra con la funzione di raccogliere informazioni utili al controllo del territorio. Oggi però sentiamo parlare anche di droni civili, sia ad uso professionale che ludico. Ma cosa sono i droni? Cosa si può fare con questi oggetti volanti e dove possiamo utilizzarli? Iniziamo con lo spiegare che cosa sono e come sono fatti.

Facciamo un po’ di ordine: i nomi e gli acronimi
I droni sono definiti, in termine tecnico e soprattutto quando utilizzati per scopi professionali, sistemi a pilotaggio remoto, più spesso indicati con le sigle SAPR (sistemi aeromobili a pilotaggio remoto), APR (aeromobili a pilotaggio remoto), SPR (sistemi a pilotaggio remoto, non sempre “volanti” ma anche di terra oppure scafi). All’estero, in lingua inglese, troviamo gli acronimi RPAS (remotely piloted aircraft system), UAV (unmanned aerial vehicle, o unmanned autonomous vehicle) e UAS (unmanned autonomous system), oltre che USV (unmanned surface vehicle) e UUV (unmanned underwater vehicle). In ogni caso, il termine corretto per identificare questo oggetto è “sistema a pilotaggio remoto”, perché è composto da un mezzo – solitamente aereo ma può essere anche di terra o d’acqua – e da una stazione di controllo remota, che comunica via radio con il sistema.
Com’è fatto un drone
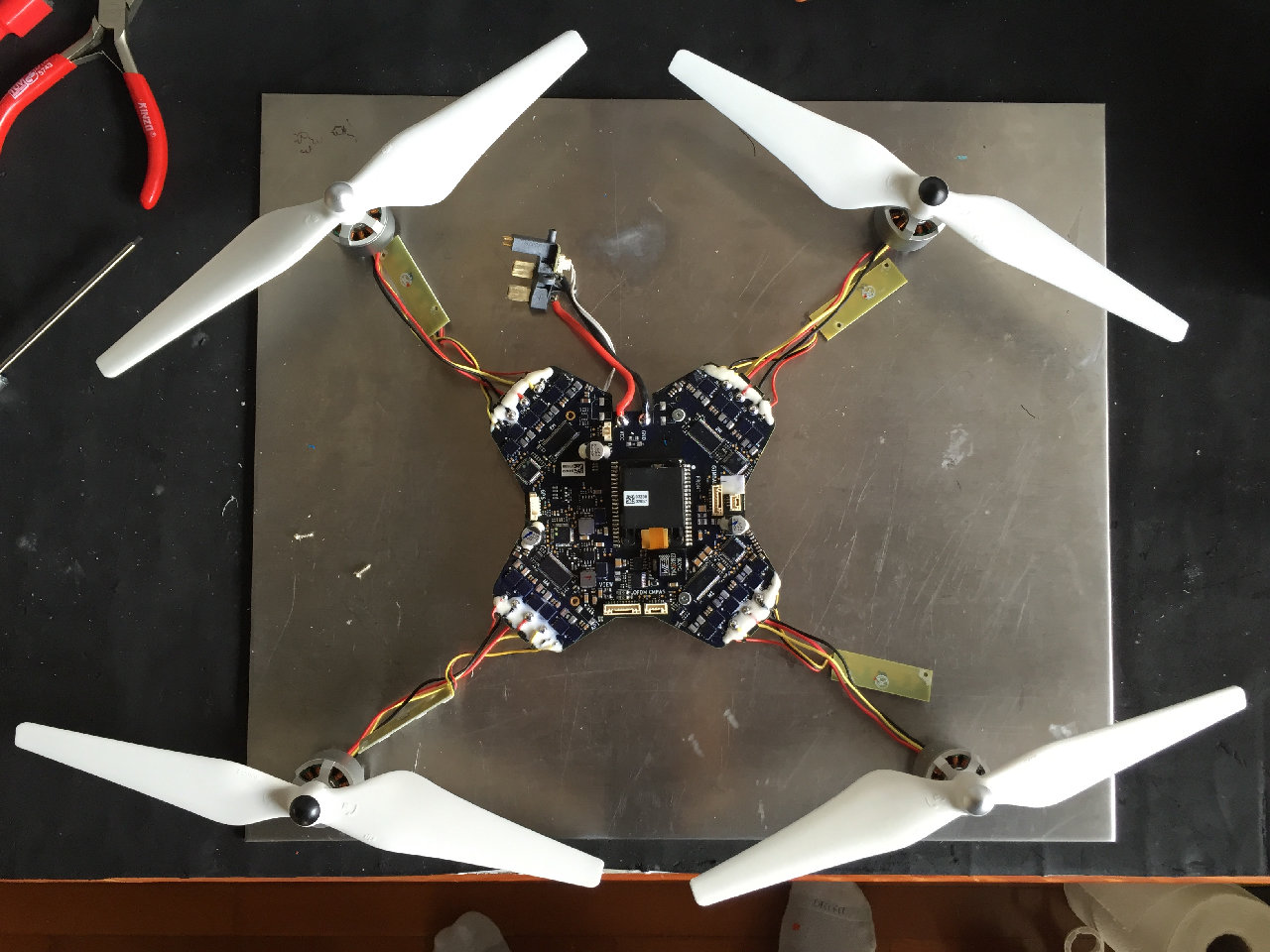
Concentriamoci sui “droni d’aria” dedicati al mercato di massa, perché al momento sono i più comuni e sono quelli che iniziamo a trovare quasi ovunque, dai centri commerciali ai negozi delle nostre città. Quelli che vengono chiamati comunemente droni, sono in realtà multirotori ovvero piccoli elicotteri con 4 o 6 eliche che ruotano in senso orario e antiorario, in modo alternato.

Il numero di eliche che ruotano in un senso e nell’altro è sempre pari, ovvero avremo, ad esempio in un quadrirotore, due eliche che ruotano in senso orario e altre due che ruotano in senso antiorario, così da compensare la coppia di rotazione e mantenere il velivolo fermo e stabile. Unica eccezione il “tricottero”, del quale però non ci occuperemo perché piuttosto obsoleto e complesso.
In un multirotore a 4 eliche, o quadricottero, avremo le eliche 1 e 3 che ruotano in senso orario, e le eliche 2 e 4 che ruotano in senso antiorario. Questo è necessario per evitare che il drone, decollando, ruoti su se stesso in modo incontrollabile a causa della coppia di rotazione delle eliche che esercitano la forza solo in una direzione, sia essa oraria o antioraria. In poche parole, una sola elica porta un elicottero a far ruotare la sua parte sottostante (carlinga, cabina o scocca che dir si voglia) in senso opposto. Per questo motivo, gli elicotteri tradizionali hanno un rotore di coda che compensa questa rotazione, mentre i multicotteri come il DJI Phantom (sicuramente il più comune) hanno un numero di eliche pari e con rotazione una opposta all’altra.
L’elettronica e i sensori
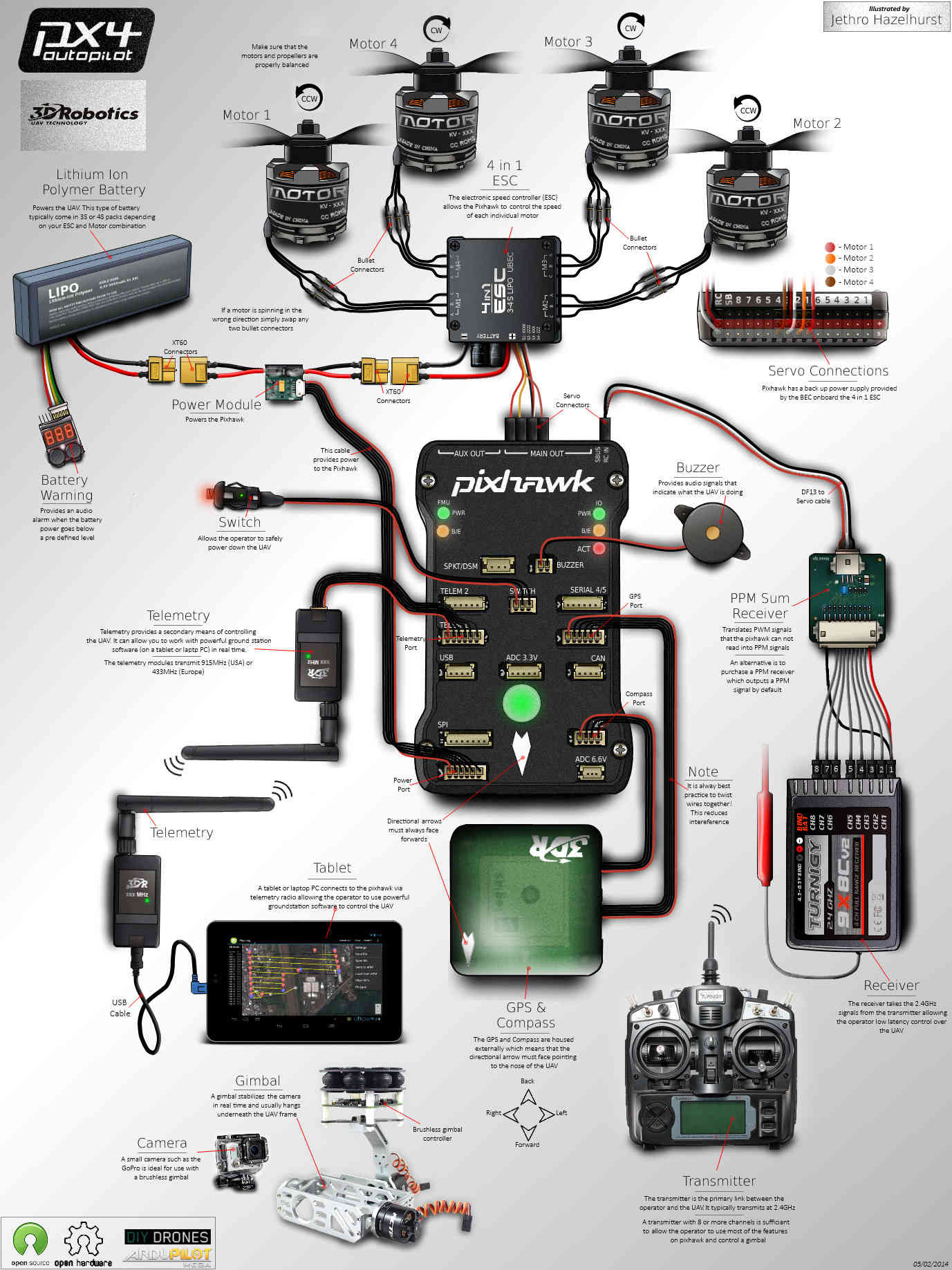
Per fare in modo che il velivolo sia facilmente utilizzabile da persone non molto esperte di pilotaggio, il drone è composto non solo da una centralina di volo – che trasforma i segnali del telecomando in movimenti aerei – ma anche da una serie di sensori che supportano il pilota semplificando il controllo del mezzo.
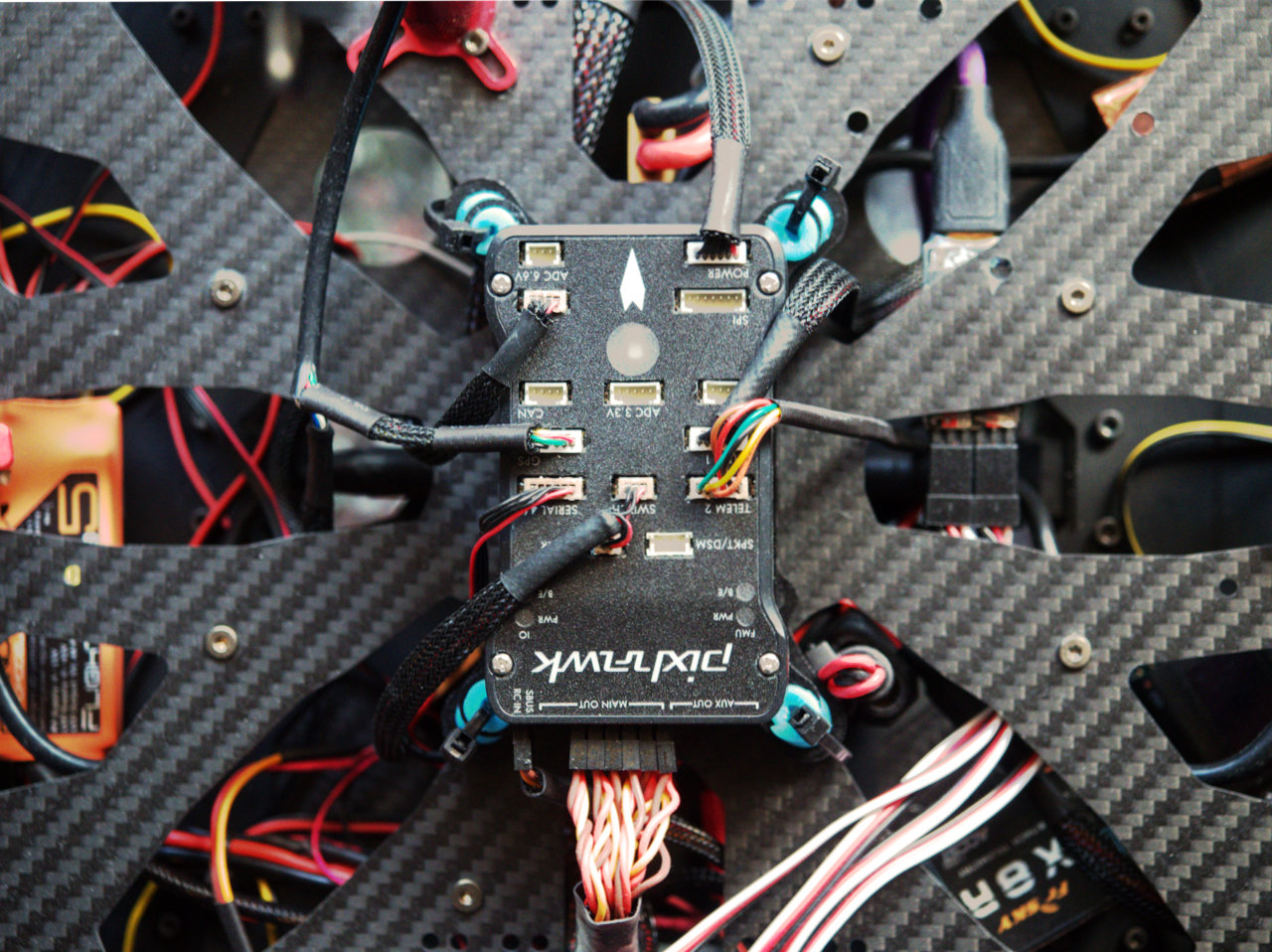
I droni utilizzano sempre una IMU (inertial management unit, o piattaforma inerziale) contenuta nella centralina di volo, con accelerometri e giroscopi integrati, una bussola utile a comunicare alla centralina l’orientamento del sistema, e un GPS che identifica la posizione del SAPR con ottima precisione. Un altro componente indispensabile è la ricevente radio, che in tempo reale inoltra alla centralina i segnali di controllo provenienti dal telecomando radio che sta nelle nostre mani a terra.

Al centro del drone si trova anche la PMU (power management unit) che distribuisce la corrente proveniente dalla batteria a tutta l’elettronica e ai motori utilizzati dal mezzo.
Con quattro eliche, avremo quindi quattro motori che sono controllati da un altro componente fondamentale: l’ESC (electronic speed controller).

L’ESC ha il compito di controllare con grandissima precisone la velocità di rotazione dei singoli motori. Sul nostro quadricottero avremo quindi 4 motori e 4 ESC, uno per ciascun motore.

La catena è quindi composta da una batteria (approfondiremo questo componente fondamentale in un articolo dedicato all’alimentazione dei sistemi) che trasmette corrente ad una piastra di distribuzione della corrente, la quale – a sua volta – invia la corrente alla centralina di volo, alla ricevente radio, agli ESC e di conseguenza ai motori.

Conclusione
Possiamo quindi riassumere questo primo articolo dicendo che i droni, soprattutto quando utilizzati come mezzi per svolgere una professione, vengono chiamati sistemi a pilotaggio remoto. Esistono diversi tipi di droni: multirotore (con più eliche, solitamente 4, 6 o 8), ad ala fissa (tipo un aeromodello tradizionale o con forma a delta, ovvero triangolare), ed esistono anche i rover (droni di “terra”) con solitamente 4 ruote. Per finire abbiamo anche scafi a pilotaggio remoto e palloni aerostatici o dirigibili, solitamente utilizzati in zone particolarmente critiche o affollate.
I droni utilizzano diversi sensori per “capire dove sono” e capire il loro assetto di volo (rollio, beccheggio e imbardata) e orientamento terrestre; hanno poi motori controllati da componenti elettronici (gli ESC) molto precisi che permettono un controllo assoluto del mezzo. I droni civili sono sempre alimentati a batteria, componente che approfondiremo durante uno di prossimi articoli perché richiede un’attenzione particolare.
Nel prossimo articolo racconteremo dove e come si può utilizzare un drone, e cosa si deve fare per diventare professionisti in questo settore.
 Oltre a richiedere rispetto ed educazione, vi ricordiamo che tutti i commenti con un link entrano in coda di moderazione e possono passare diverse ore prima che un admin li attivi. Anche i punti senza uno spazio dopo possono essere considerati link causando lo stesso problema.
Oltre a richiedere rispetto ed educazione, vi ricordiamo che tutti i commenti con un link entrano in coda di moderazione e possono passare diverse ore prima che un admin li attivi. Anche i punti senza uno spazio dopo possono essere considerati link causando lo stesso problema.